
Aperçu de l’avion et des instruments de bord
Depuis 1991, l’UGMM effectue ses vols d’observation au-dessus de la mer avec un avion de reconnaissance bimoteur de type « Britten-Norman Islander ». Avec une autonomie de vol de 5 heures et une vitesse de croisière moyenne de 120 nœuds, le Britten-Norman Islander est parfaitement adapté pour assurer une surveillance régulière au-dessus de la mer du Nord. L’avion possède également deux hublots latéraux convexes, ce qui accroît grandement la qualité des observations visuelles de pollution ou le suivi de mammifères marins. Jusqu’en 2005, l’engin utilisé était la propriété de la Défense et était donc un appareil militaire. Il était stationné à l'Ecole de l'Aviation légère de Brasschaat, et portait l’indicatif radio « B-02 ». L’UGMM a spécialement équipé le B-02 de différents capteurs et instruments indispensables pour mener efficacement sa mission principale, à savoir la détection de la pollution marine. En 2005, quand la Défense a retiré ce type d’avion de la circulation, l’appareil a été transféré au SPF Politique scientifique et s’est vu attribuer le nouvel indicatif « OO-MMM ». En 2012, après 20 ans de surveillance aérienne, l’avion a été équipé d’un nouveau système de télédétection par radar numérique entièrement intégré qui a considérablement accéléré la documentation et la transmission des différentes observations et constatations, et donc aussi leur suivi sur terre. En 2015, un prototype de capteur renifleur a été installé dans l’avion pour surveiller les émissions de soufre des navires en mer.
Sur cette page, vous trouverez toutes les informations sur la lutte contre la pollution de l'air par les navires.
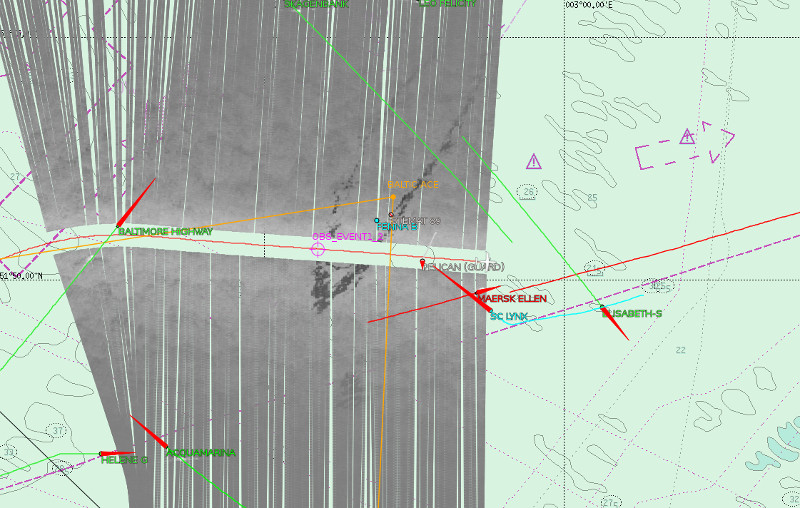
Les appareils de télédétection (et autres) de l’avion de surveillance fonctionnent de la manière suivante : le Side-Looking Airborne Radar (SLAR) scanne la surface de la mer sur une distance latérale de 20 km à droite et à gauche de l’avion (capteur à longue portée). Les deux tubes noirs sous l’avion sont les antennes latérales du SLAR, qui captent des signaux radar réfléchis. Une ligne ou une tache noire apparaissant sur une image SLAR en fort contraste avec l’eau de mer environnante (d’une couleur grise uniforme sur une image SLAR) indique une possible pollution marine. L’effet lissant des matières huileuses sur les vagues est à la base de cette forme de télédétection. Les nappes d’hydrocarbures ou d’autres substances dérivantes à effet lissant peuvent ainsi être détectées à distance de jour comme de nuit et par bonne ou mauvaise visibilité. La présence de substances déversées en mer qui ne présentent pas d’effet lissant sur les vagues et/ou se retrouvent dans la colonne d’eau est observée principalement de façon visuelle.

La caméra infrarouge supplémentaire à bord de l’avion est un capteur à courte portée. Quand un phénomène de pollution est détecté à distance et que l’avion se rend sur place, une image complémentaire de la nappe peut être obtenue à l’aide d’une caméra IR. Celle-ci capte en effet les différences de température entre une nappe et l’eau qui l’entoure, et peut donc être utilisée tant de jour que de nuit. Les parties plus fines d’une nappe apparaissent « plus froides » à l’image en raison de l’évaporation, tandis que les parties plus épaisses apparaissent « plus chaudes » en raison de leur réchauffement par le soleil. La capacité à distinguer les parties plus fines ou plus épaisses d’une nappe d’hydrocarbures est essentielle surtout lors d’opérations de lutte contre les hydrocarbures.
L’avion est aussi équipé d’une caméra numérique et de deux appareils photo numériques. Lorsqu’un agent fait une constatation en mer, il est important de la documenter correctement. Des photosprécises permettent de visualiser immédiatement une constatation. Les photos numériques peuvent être envoyées rapidement aux services compétents à terre chargés de la suite de l’enquête ou des interventions d’urgence en mer. Les images vidéo numériques permettent d’obtenir un enregistrement vidéo continu d’une constatation, par exemple en survolant une nappe d’hydrocarbures jusqu’à un bateau suspect.
Le GPS et le Flight Management System (FMS) permettent d’indiquer le lieu exact de la constatation, mais aussi d’enregistrer l’heure et la date, la vitesse et la direction du vent, le cap et la vitesse de l’avion.
L’unité de contrôle centrale MEDUSA intègre les différents capteurs et images des capteurs. Elle est également équipée d’une carte nautique numérique et possède un récepteur SIA intégré pour identifier automatiquement les bateaux à distance.
Depuis 2015, l’avion est aussi équipé d’un capteur renifleur de SO2. Ce nouveau capteur lui permet de mesurer la concentration de soufre dans les panaches de fumée émanant des navires et ainsi de réaliser une estimation de la teneur en soufre du carburant utilisé.
Par ailleurs, l’avion est équipé de tous les moyens de communication nécessaires pour pouvoir mener efficacement ses missions. Le mariphone VHF est utilisé pour la communication entre l’avion et les navires. Le canal de détresse (16) et le canal de la Garde côtière (67) sont toujours suivis dans l’avion. Le canal 73 est le canal antipollution et est réservé aux communications en lien avec la pollution marine. Tous les opérateurs à bord de l’avion de la garde côtière sont titulaires d’un certificat qui les autorise à utiliser la VHF marine.
La communication par satellite (SATCOM) est aussi utilisée. Elle permet aux pilotes d’obtenir en temps réel des informations météorologiques et de passer des communications téléphoniques.
Enfin, l’avion est aussi équipé d’une clé WiFi avec connexion à la 4G. Il est ainsi possible, après le vol, d’envoyer immédiatement aux partenaires concernés les rapports de vol initiaux et les photos et vidéos correspondantes.
Avion
-
Modèle : Britten-Norman Islander
-
Indicatif : OO-MMM (auparavant B-02)
-
Longueur/hauteur : 10,9 m / 3,77 m
-
Envergure : 14,02 m
-
Vitesse de croisière : 120 nd (220 km/h)
-
Autonomie : 5 h
-
Poids maximum : 3000 kg
-
Moteurs : 2 moteurs Lycoming (300 ch)

Instruments de bord
| Instrument | Détails | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RADAR |
|
||||||||||
| Positionnement GPS et Flight Management System |
|
||||||||||
| Unité de contrôle (Mission Management Unit) |
|
||||||||||
| Altimètre radar |
|
||||||||||
| Émetteur-récepteur VHF/FM pour avion |
|
||||||||||
| SATCOM |
|
||||||||||
| Stormscope |
|
||||||||||
| Traffic Advisory System (TAS) |
|
||||||||||
| Écran du cockpit |
|
||||||||||
| Système renifleur |
|
||||||||||
Zone de surveillance
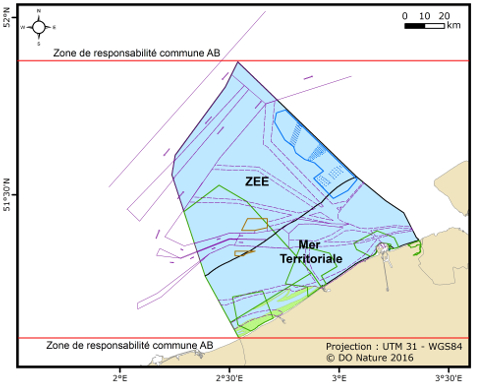
La zone de surveillance pour la mission principale de l’avion, à savoir le repérage de pollution marine aux hydrocarbures et autres substances nocives émises par des navires, est définie dans l’Accord de Bonn comme la « zone de responsabilité commune de l’Accord de Bonn ». Cette zone se situe entre deux parallèles nord dans la mer du Nord méridionale et couvre les zones maritimes belges et les eaux alentours des pays voisins. La Belgique, les Pays-Bas, la France et le Royaume-Uni ont le droit d’effectuer des vols réguliers de contrôle de la pollution dans cette zone. Cette partie de la mer du Nord méridionale est connue pour être l’un des passages maritimes les plus densément fréquentés au monde, ce qui en fait une zone à haut risque de déversements opérationnels ou accidentels susceptibles de porter atteinte aux intérêts des quatre États côtiers à proximité.
Les vols de contrôle des activités de pêche, ainsi que d’autres missions nationales de surveillance de la Garde côtière belge, sont principalement menées au-dessus des zones maritimes belges, qui comprennent les eaux territoriales et la zone économique exclusive (ZEE) du pays. La surveillance scientifique se déroule aussi principalement au-dessus des zones maritimes belges.
Méthode
L’avion de surveillance de l’UGMM opère plusieurs jours par semaine au-dessus de la mer, de nuit comme de jour, et en semaine comme le week-end. La stabilité de l’appareil et les instruments de bord permettent aussi à l’avion d’opérer en cas brouillard ou de mauvais temps. Étant donné la nature de la mission, la planification des vols est strictement confidentielle.
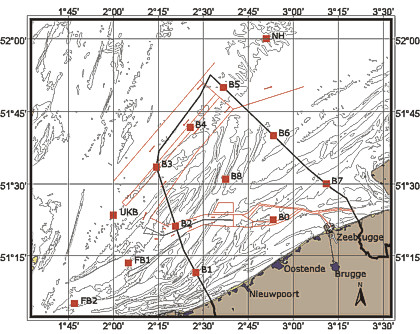
Chaque vol de surveillance parcourt un trajet planifié à l’avance et variant continuellement entre coordonnées établies. Les itinéraires de vol sont élaborés sur la base de quelques points de passage fixes (waypoints : B1, FB2, UKB, NH...). Bien sûr, un vol peut toujours dévier du trajet prévu en fonction des observations faites en mer.
La plupart des nappes observées en mer résultent d’opérations de navires, et sont donc qualifiées de « déversements opérationnels ». Les normes pour ces déversements en vigueur au niveau international sont établies dans la Convention MARPOL 73/78. L’Annexe I à cette convention réglemente les rejets d’hydrocarbures minéraux par les navires, l’Annexe II réglemente les rejets d’autres substances liquides nocives par les navires (les Noxious Liquid Substances, NLS), l’Annexe V réglemente le déversement de matières solides et d’ordures depuis les navires. L’Annexe VI aborde la pollution atmosphérique par les navires et a récemment donné lieu à une nouvelle mission de surveillance de l’UGMM, à savoir le suivi des émissions provenant des navires en mer du Nord à l’aide d’un capteur renifleur.
En cas d’abordage en mer ou d’autre accident de navigation, des déversements accidentels peuvent également survenir. Ils sont détectés et documentés depuis l’avion de la même manière que les déversements opérationnels d’hydrocarbures ou d’autres substances liquides nocives.
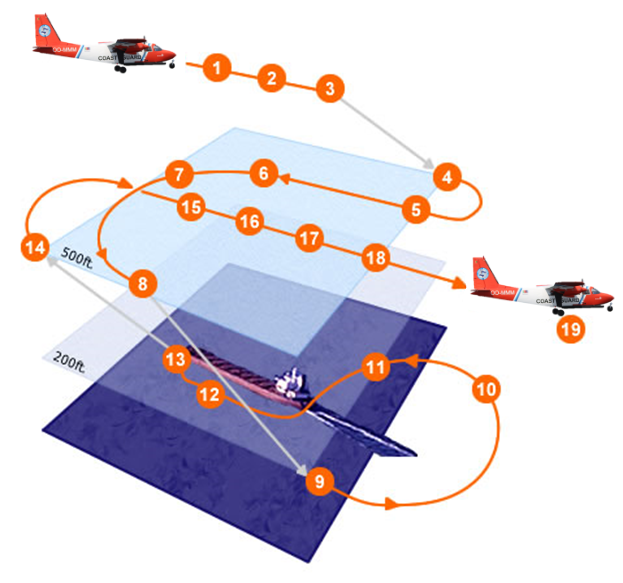
| Points d’action | Action |
|---|---|
| 1 | Détection |
| 2 | Détection par caméra et SLAR |
| 3 | Enregistrement d’images SLAR |
| 4 | Descente à 500 pieds |
| 5 - 8 | Enregistrements vidéo de la trace |
| 9 | Descente à 200 pieds |
| 10 | Enregistrements détaillés de la nappe d’hydrocarbures (ou d’autres substances liquides nocives) |
| 11 - 13 | Enregistrements détaillés du navire (nom, etc.) |
| 14 | Montée à 500 pieds |
| 15 - 17 | Enregistrements supplémentaires à plus haute altitude |
| 17 - 18 | Derniers enregistrements vidéo et à l’aide de capteurs, et stockage des données (y compris SIA) |
| 19 | Synthèse des données et rapportage, y compris des conversations radio entre le navire et l’avion |
La pollution marine aux hydrocarbures ou à d’autres substances liquides nocives
Lors d’un vol de routine de contrôle de la pollution, les opérateurs aériens essaient de repérer la pollution visuellement et à l’aide de capteurs.
S’il détecte une pollution aux hydrocarbures minéraux, l’opérateur s’en approche toujours pour calculer la quantité d’hydrocarbures déversée dérivant à la surface de l’eau. Cette estimation du volume d’hydrocarbures déversés en mer permet en effet d’évaluer la gravité du phénomène et son impact sur l’écosystème marin.
Très souvent, le navire pollueur s’est malheureusement déjà fort éloigné lors qu’un cas de pollution maritime opérationnelle est détecté. Lorsqu’un navire est pris en flagrant délit de déversement opérationnel illégal, l’avion effectue une manœuvre supplémentaire pour s’approcher du bateau et identifier le pollueur. Sa mission consiste à suivre de façon sécurisée, de jour comme de nuit, la trace de pollution jusque dans le sillage du navire, de s’en approcher suffisamment pour lire le nom et le port d’attache inscrits sur sa coque, et de rapporter toutes ces données en temps réel. Après le constat, un rapport de vol est transmis le plus rapidement possible à la centrale de la Garde côtière afin que les autorités policières et judiciaires puissent prendre sans délai le relais de l’enquête.
Lors des vols de surveillance pour les émissions de soufre, effectués en application de l’Annexe VI de MARPOL, la collaboration et la communication avec le réseau européen d’inspection portuaire ou « contrôle par l’État du port » (Port State Control, PSC) jouent un rôle essentiel. Le PSC est responsable de la réalisation et de la coordination des inspections portuaires des navires (en application des directives CE 2016/802 et 2015/253). Aucun PV n’est (encore) dressé sur la seule base des mesures des émissions de soufre. Un PV ne sera rédigé qu’en cas de preuve suffisante d’infraction lors d’une inspection portuaire, avec prélèvements d’échantillons de carburants. Les mesures des émissions de soufre en mer par le capteur renifleur relèvent donc davantage d’un système de ciblage visant à améliorer l’efficacité des inspections portuaires.
